Description
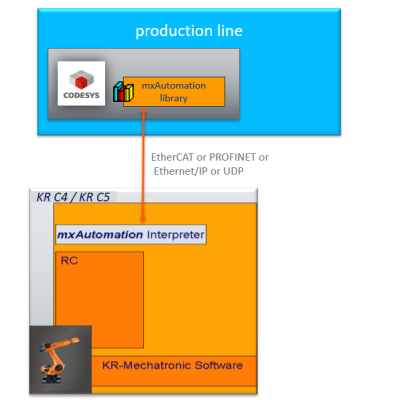
The library brings nearly all programming commands of the KUKA language into the PLC. Existing option packages, e.g. KUKA.ConveyorTech or KUKA.VectorMove, can be addressed via the FBs of mxAutomation. PLCopen compliant FBs allow easy application.
The download contains four identical projects, each with a different fieldbus connection to the robot. (Profinet, Ethernet/IP, EtherCAT and UDP)
Requirements
Programming system | CODESYS Development System V3.5.10.0 |
Target System | CODESYS Control V3.5.10.0 |
Supported platforms/devices | Robots Control type: KR C4 Simulation via “KR C4 OPS“ possible |
Additional requirements on the KUKA robot | System software: from KSS 8.5.0 Software option: mxAutomation V3.0.2 Configuration software: from WorkVisual V5.0.0 |
Licensing | It is not necessary to license the PLC Library |
Restrictions | These examples demonstrate just the basic structure of an mxAutomation PLC program. KUKA does assume no liability for using these examples on our real robot. |
Necessary accessories | Minimum requirement for the communication interface at your KUKA robot. For PROFInet -> KUKA.ProfiNet 4.1 (additional software) For EtherNet/IP -> KR C4 EtherNet/IP 3.1 (additional software) For EtherCAT -> EtherCAT Bridge FSoE M/M (additional software) For UDP -> noting |